スマート義手の開発は可能か、事前調査編
この記事にはアフィリエイト広告・広告が含まれています。
これまで能動義手、筋電義手といった言葉とは無縁の生活を送っていた。
しかし、先日購入した3Dプリンターのゴールが「義手」、さらに言えば誰にとっても便利な「スマート義手」(=義手パーツの普及)となりそうだ。
オープンソースのプロジェクトを見て回ったところ、やはり義手は高額だった。
その理由は利用者が圧倒的に少なく、開発者も少ないから部材の入手や開発人員・メーカーが限られてしまい結果として高額になってしまう。
それでは、手の荒れる皿洗いや風呂掃除、怪我をしやすい工作に「スマート義手が便利」となれば、どうだろうか。
最新スマートフォンを買い替えるように映画のヒーローやヒロインと同じモデルが欲しいとなれば、、、「スマート義手が普及」すれば、、、未来は変わるのではないだろうか。
多くの開発者を呼び込み、iPhone並みにサプライヤーが参戦して部材の流通が早くなれば義手だけでなくロボット分野さえ発展するかもしれない。
ガンダムのいる国の一人として、孤独なプロジェクトをスタートさせた。
ー
この記事を公開する目的は「これなら自分でも出来るかも」と挑戦者が増えることにある。
スマート義手はどこへ行った
はじめにスマート義手の現実的な制御を考えると「筋電センサー」+「物理スイッチ」という構成になる。
本当に義手を必要としている人にとって「物理スイッチ」は使えない場合もあるが、それ以外の「スマート義手に必要な部材の9割近く」は共通パーツだ。
スマート義手が普及すれば本当に義手を必要とする人も「義手パーツの普及」により安価に入手できると思っている。
筋電センサーで義手の基本的な動きを再現し、指や手首の物理的な圧力による「いわゆるキーボード操作」による次のような機能をイメージしている。
- アームの伸縮
- 握力の強弱
- アタッチメントの操作(シンプルなON/OFF+アルファ程度)
- スマートフォン機能(通話やショートメッセージetc)
- キーボード入力・マウス入力の機能
- ジェスチャー機能
- 他には防塵防水IP67(最終目標、水仕事に)など
こういった機能により清潔さや筋力が求められる介護や物理的な接触を避けることによるウィルス対策なども実現できるはず。
しかし、上記すべてを1つのスマート義手に詰め込むことは難しい。
そもそもNintendo SwitchやSteam Deckでさえ30分も持っていられない私にとってスマート義手の重量は最大300gだと思っている。
仮に1kgを超える場合は腕に装着するのではなく、肩から「第3の手」としてゲームコントローラーのように操作することになるだろう。
スマート義手に必要なモノ。
アイデアは止まらなくなってしまい時間を奪っていくので制作の話をすると、大きくわけて次のようなモノが必要になるようだ。
- 義手のパーツ(FDM式3Dプリンターで印刷)
- 筋電センサーの基盤(FDM式3Dプリンターで印刷できるらしい)
- サーボモーター等
3Dプリンターによる義手パーツ製造プロジェクト
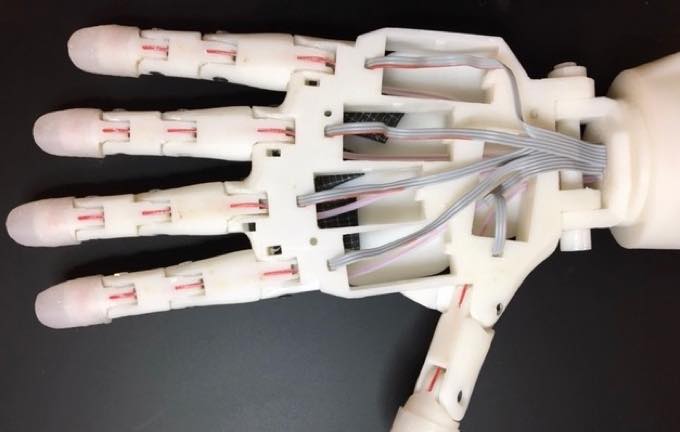
義手のパーツを3Dプリンターで印刷する事例は多く、有名どころではInMoov(InMoov.frへ)が挙げられる。
その中にあるハンド部門(InMoovへ)だけでもクールなプロジェクトだ。
日本ではexiii(イクシー)の発表したオープンソースの「HACKberry」(exiiiへ)があり、こちらは部材調達の方法などもわかりやすく記載されているのが特徴。
InMoovは人型ロボットも視野に入れた開発、exiiiは義手をメインにしており、プロジェクトは異なるがオープンソースで効率的に情報収集できるという点では最短距離でゴールしたいときに頼れそうだ。
同様のプロジェクトは世界で大小様々なゴールを掲げて存在していた。
それらを比較検討して最も重要だと思ったのが先ほどのリストにある「2」だった。
筋電センサーの基盤制作
3Dプリンターで義手のパーツは印刷しやすくなった。
筋を再現する方法も修繕が容易とする歯車タイプや入手性が高く安価な釣り糸を使うなど創意工夫を見ているのは楽しい。
しかし、最も重要なのが「要となる筋電センサー」だと思う。
その基盤を制作したという猛者もいて「簡易筋電計」(ウェブサイトへ)と名付けられているが、在庫切れなど入手性に優れないMyoWareの筋電センサーと変わらない波形を検出しているように見える。
(追記ここから)
上記ウェブサイトで配布されているガーバーデータ(配布ページへ)から電気回路を書き出す方法はOnline Gerber Viewer(gerver-viewer.comへ)で利用できる模様。
(追記ここまで)
厳密に数値がとれているのかはトライアンドエラーを繰り返すしかないが、基本的に基盤を取り寄せて格安の電子工作品で筋電センサーを制作できるというのは画期的だ。
理学療法士の方は筋電計へのアンテナが高いようで先ほどのプロジェクトを参考に自作したという記事(forPTへ)もあった。
その記事では自作の筋電位センサーは断念されている。
おそらくスマート義手は何度も試作機つくって楽しむことになると思うが、その時に100個単位で基盤を外注していたら「研究費が足りない」というフレーズが言いたい人だと思われてしまう。
しかし、PCB基盤は格安の3DプリンターEnder-3(無印バージョン)でも制作できる(例:下記の動画)ことがわかっている。
他にも3Dプリンターによる基盤自作例は複数あるため、どれがゴールへの最短距離かで選ぶことになりそうだ。
やはり3Dプリンターで義手パーツからPCB基盤まで制作することになりそうだ。
3Dプリンターで義手を印刷してサーボモーターで動作させるまではオープンソース・プロジェクトを補助輪として容易に辿り着けるが、そこから先はオリジナル。
すでにライブラリも豊富で、変数を変えるだけで任意の動作結果を得られるところまで辿り着いているコードも確認できた。
手の動作自体はシンプルに考えれば難しくはないはず。
スマート義手は筋電センサーの数値を判断するコードとPCB基盤の印刷が鍵となりそうだ。
これはスマート義手を作りたいと思い描いてから3日ほどで調べ回った結果であり、電子工作は未経験という残念なポジションにいるが、知識がなくてゴールが明確という状態が最強だと思う。真っ直ぐ目的地へ進めるはず。
とりあえず3D CAD用のパソコンは調達(下記リンク)したので、どこまでできるのか試してみたい。
気付けばブログ執筆そのものがライフワーク。ども、タブクル管理人です。
かつて夢見た「タブレットやスマホを操り、生産的な活動をする未来」。最近は、その実現を加速させるAIに夢中です。AIは思考力を奪うという意見もありますが「どう使うか、どんな指示を出すか」と、以前より思考力が試される時代の幕開けだと思います。














